
 |
| Марс. Рассвет над кратером Гейла (Изображение NASA) |
Все началось 41 год тому назад, когда космический аппарат, стартовавший 19 мая 1971 года с космодрома Байконур, впервые коснулся поверхности Красной планеты 27 ноября того же года в Долине Нанеди Земли Ксанфа
В настоящее время Марс активно исследуют 3 автоматические межпланетные станции (АМС), находящиеся на его орбите:
- Mars Reconnaissance Orbiter, США
- Марс-экспресс, Европейское космическое агентство (ЕКА);
- Марс Одиссей, США.
На пути к Марсу находится АМС, несущая марсоход Curiosity (Любопытство), которая была запущена в ноябре 2011 года.(США).

Марсоход Opportunity в кратере Индевор 9 марта 2012 года
(NASA)

Кратер Гейла - место посадки Curiosity в августе 2012 года В центре - гора Шарп (NASA)
Но все началось 41 год тому назад, когда космический аппарат, стартовавший 19 мая 1971 года с космодрома Байконур, впервые коснулся поверхности Красной планеты 27 ноября того же года в Долине Нанеди Земли Ксанфа.

Долина Нанеди. Ширина меняетсяот 0,8 до 5 км, а ее максимальная глубина составляет примерно 500 м. Эта долина имеет относительно плоское дно и крутые склоны
(NASA)
Это была советская автоматическая межпланетная станция "Марс-2". А 2 декабря посадочный модуль ее двойника АМС Марс-3 впервые совершил мягкую посадку в районе с координатами 158° западной долготы и 45° южной широты.
Свою миссию они выполнили частично. Спускаемый аппарат "Марс-2" разбился при посадке, а "Марс-3" работал только 20 секунд (предположительно вышел из строя из-за пылевой бури).

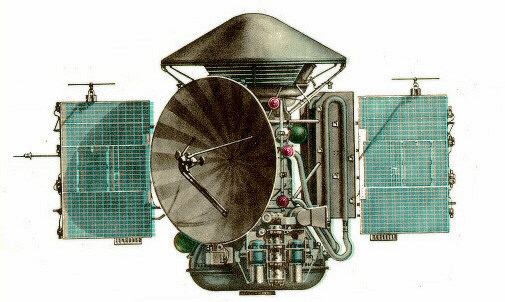
АМС Марс-2 и 3 (НПО Им.Лавочкина) АМС Марс (НПО Им.Лавочкина)
Используя опыт работы с «Луноходом», конструкторы Института транспортного машиностроения (ВНИИ-ТРАНСМАШ) под руководством А.Л. Кемурджиана создали небольшого, размером 25 см х 22 см х 4 см и массой 4,5 кг, робота, которому предстояло высадиться на Марс.
Задачи у этого мини-марсохода были скромные - он должен был пройти лишь небольшое расстояние, оставаясь соединенным с посадочным аппаратом кабелем длиной 15 м. Свойства марсианского грунта были неизвестны, поэтому, чтобы не провалиться в пыль или песок, марсоходу были сделаны стальные опоры в виде лыж.

Марсоход ПрОП-М
(НПО Им.Лавочкина)

Сборка манипулятора ПрОП-М
(НПО Им.Лавочкина)
Движение осуществлялось следующим образом: опираясь на лыжи, корпус переносился вперед,аппарат садился на днище и лыжи перемещались на следующий шаг. Поворот производился путем перемещения лыж в разные стороны. В случае, если аппарат встречал препятствие (касание двухконтактного бампера спереди), он самостоятельно делал маневр объезда: отход назад, поворот на некоторый угол, движение вперед.
Каждые 1,5 метра предусматривалась остановка для подтверждения правильности курса движения. Этот элементарный искусственный интеллект был необходим для марсианских подвижных аппаратов, так как сигнал от Земли до Марса идет от 4 до 20 минут, а это слишком долго для подвижного робота. К моменту прихода команд с Земли, ровер, возможно, уже вышел бы из строя.
Хотя посадочные модули Марс-2 и 3 перестали функционировать, орбитальные аппараты успешно выполнили свои миссии и передали на Землю ценные научные данные о Красной планете.

Марс. Фото АМС Марс-3
(НПО Им.Лавочкина)
Первый американский марсоход Sojourner (Скиталец) 5 июля1997 съехал с посадочного аппарата Mars Pathfinder и 6 июля приступил к научным экспериментам (в частности, изучению ближайшего камня). Это произошло почти 26 лет спустя после миссии Марс-2 и Марс-3 с "марсошлепом" на борту (так между собой называли специалисты ВНИИ-ТРАНСМАШа мини-ровер).

Марсоход Sojourner
(NASA)
Кстати, вполне возможно,что наш мини-ровер все-таки поехал несколько метров по поверхности Марса, ведь прекратилась связь посадочного модуля с Землей, а не с марсоходом.
В наши дни идея лыжно-шагающего движителя нашла свое продолжение в проекте частного лунного самоходного робота "Селеноход", который создается российской командой, участвующей в конкурсе Google Lunar X PRIZE.
Правила конкурса требуют, чтобы его участники создали за счет частных средств беспилотный аппарат, который до конца 2015 года достигнет лунной поверхности, проедет по ней как минимум 500 метров и передаст на Землю видео высокого разрешения и фотографии.
ОАО "Всероссийский научно-исследовательский институт транспортного машиностроения" в рамках международной программы Эврика разработало шасси для транспортировки научной аппаратуры при исследовании поверхности планет, сделав переход от "лыж" 1971 года к движителю с высокой профильной и опорной проходимостью и маневренностью.

Высокоэффективный транспортный робот -планетоход
(ВНИИТРАНСМАШ)
По материалам открытых источников
Комментариев нет:
Отправить комментарий