
Команда марсохода Curiosity рассматривает возможность проезда через небольшую песчаную дюну в качестве наиболее благоприятного маршрута к намеченным объектам научных исследований.Оптимальный маршрут должен миновать участки местности с острыми камнями, которые могут повредить покрытие алюминиевых колес ровера
По сообщению NASA, с 1 января этого года марсоход Curiosity преодолел 264,7 метра, а с момента посадки в августе 2012 года его путь составил 4,89 километра. Колеса ровера подверглись значительному износу.
 Оснащенные 20-дюймовыми (50,8 см) дисками из авиационного алюминия, колеса ровера изрядно поизносились после 528 дней странствий по Красной планете. За это время Curiosiy проехал 4,91 километра.
Оснащенные 20-дюймовыми (50,8 см) дисками из авиационного алюминия, колеса ровера изрядно поизносились после 528 дней странствий по Красной планете. За это время Curiosiy проехал 4,91 километра.
Слева на снимке от 30 ноября 2013года - левое переднее колесо, видны вмятины и прорехи покрытия
Поэтому команда ровера приступает к очередному вождению с дополнительными мерами предосторожности - тщательно проверяется состояние колес, выбираются такие маршруты и методы вождения, при которых можно было бы избежать их повреждение.


"Мы посмотрим через дюны на западную сторону долины, чтобы убедиться в том, что местность выглядит также благоприятно, как это следует из анализа орбитальных снимков". Орбитальные изображения были получены камерой HiRISE, установленной на искусственном спутнике Марса - зонде НАСА Mars Reconnaissance Orbiter (MRO).

Для того, чтобы узнать больше о песчаной дюне в Dingo Gap, ровер подъедет к ней вплотную. Тесты на перемещение по наземным песчаным дюнам показали, что MSL сможет подняться на дюну, но специалисты еще не знают всех особенностей движения ровера вверх по песчаному откосу.
В свое время марсоход Opportunity в течение пяти недель выбирался из песчаной ловушки, а ровер Spirit вовсе застрял. Причина во многом состояла в том, что на песчаных участках по маршруту аппаратов содержалось большее количество мелкозернистой пыли, чем в обычных дюнах на Земле. Поэтому MSL должна предварительно изучить внутреннее строение марсианской дюны.



Другие варианты маршрутов движения "Любопытства" от текущего местоположения к намеченной буровой площадке "KMS-9" были также оценены специалистами JPL.
Участок "KMS-9" находится в 800 метрах езды по прямой линии, но значительно дальше по любому рассмотренному варианту маршрута. Параметры маршрутов были определены научной командой Curiosity на основе орбитальных снимков MRO.
В "KMS-9" мы определили три типа рельефа. Участок имеет свободную и относительно очищенную от пыли поверхность", - сказала Кэти Стек (Katie Stack), сотрудник научной группы из Калифорнийского технологического института в Пасадине.
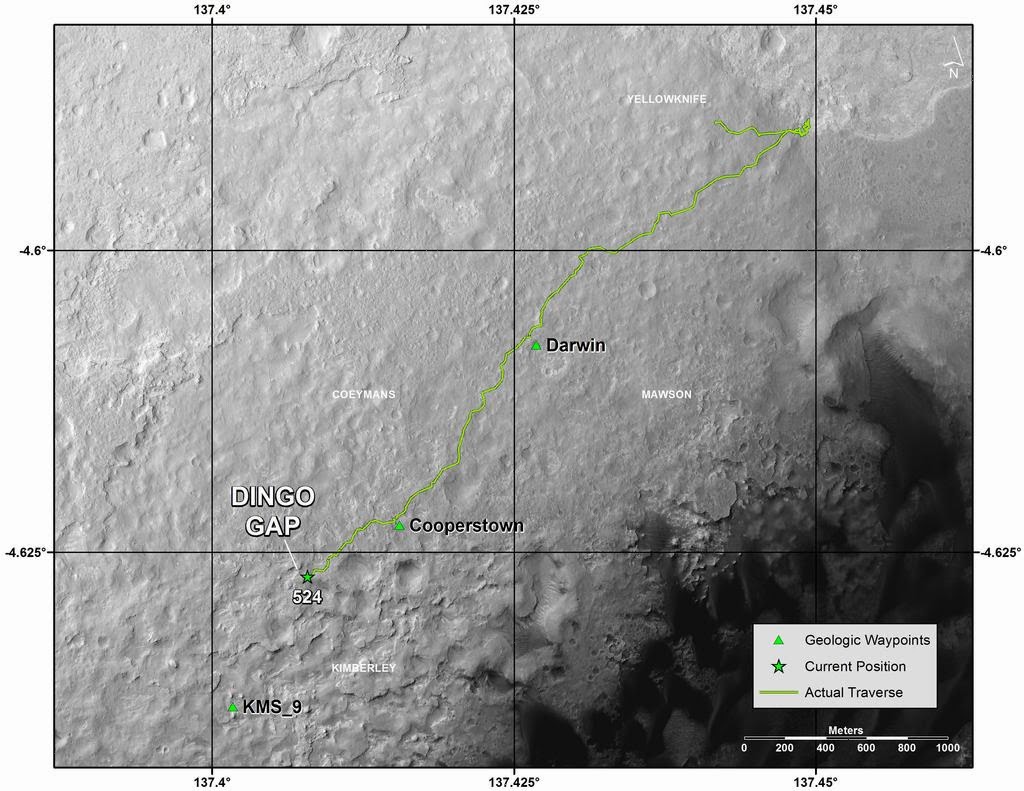 Перед посадкой Curiosity внутри кратера Гейла, научная группа MSL, используя орбитальные изображения, разбила местность на 140 квадратных участков* со стороной 1,5 км каждый. Марсоход приземлился в квадрате "Yellowknife" и затем двигался через "Mawson" и "Coeymans." В этом месяце он вошел в квадрат "Kimberley". Именно здесь располагается участок KMS-9 (NASA/JPL)
Перед посадкой Curiosity внутри кратера Гейла, научная группа MSL, используя орбитальные изображения, разбила местность на 140 квадратных участков* со стороной 1,5 км каждый. Марсоход приземлился в квадрате "Yellowknife" и затем двигался через "Mawson" и "Coeymans." В этом месяце он вошел в квадрат "Kimberley". Именно здесь располагается участок KMS-9 (NASA/JPL)

По словам Стек, эта область привлекательна тем, что здесь находятся участки рельефа отличные ото всех, которые Curiosity посетил до сих пор.
Один участок испещрен бороздками, которые ориентированы в одном направлении. Поверхность другого гладкая, без канавок. Ученые еще не знают, что они из себя представляют.
Исследование KMS-9, возможно, позволит планетологам увидеть новые особенности формирования марсианской поверхности.
Справа на снимке - область KMS-9, которую ровер должен исследовать на пути к горе Шарп. Стрелками показаны уступы между поверхностями различных уровней. Вполне возможно, что обнажения горных пород, примыкающие к этим уступам, являются результатом ветровой эрозии
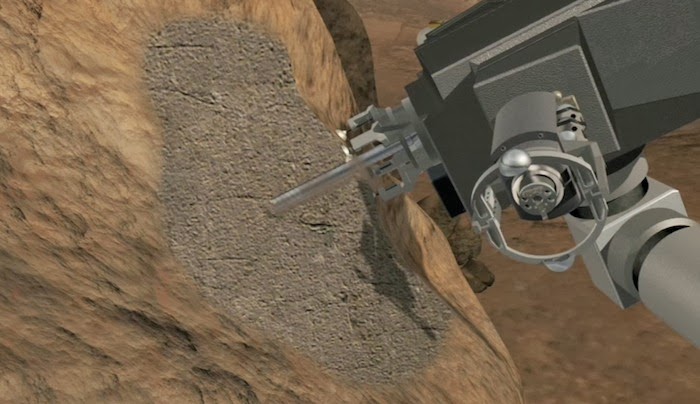
В настоящее время ведется подготовка к предстоящим работам на склонах горы Шарп. Для этого инженеры JPL используют тест-ровер. С его помощью специалисты проверяют способность марсохода выдерживать незначительные проскальзывания на склонах во время работы буровой дрели.
Тесты имитировали смещение ровера до 5 сантиметров во время сверления скальной породы, при этом никакого ущерба механизмам причинено не было.
По словам Даниэля Лимонади (Daniel Limonadi), ведущего инженера по отбору проб, тесты подкрепляют уверенность специалистов в успешном выполнении различных манипуляций на склонах горы Шарп роботизированной рукой марсохода.
Другие испытания в JPL помогают изучать различные приемы вождения, которые могут помочь снизить уровень повреждений колесных покрытий. При этом проверяются возможности движения ровера задним ходом, или приводом четырех колес вместо полных шести.

Некоторые из повреждений могут происходить от усилия задних колес, толкающих средние или передние колеса, которые наткнулись на острые камни, а не от веса ровера, движущегося по острым скальным обломкам.
Продолжая выбирать оптимальные маршруты и приемы вождения, команда Curiosity намерена включить в свой рабочий график дополнительные выходные и вечерние смены в феврале, что позволит планировать большее количество передвижений марсохода.
По материалам NASA/JPL, Astrogeology Science Center USGS
Статьи по теме:
 Марсоход Curiosity - софт обновляется, колеса стареют
Марсоход Curiosity - софт обновляется, колеса стареют
По сообщению NASA, с 1 января этого года марсоход Curiosity преодолел 264,7 метра, а с момента посадки в августе 2012 года его путь составил 4,89 километра. Колеса ровера подверглись значительному износу.
Слева на снимке от 30 ноября 2013года - левое переднее колесо, видны вмятины и прорехи покрытия
Внизу - состояние колес на 30 января 2014 года (NASA/JPL)

Количество проколов и разрывов в мембранах резко возросло в четвертом квартале 2013 года.Поэтому команда ровера приступает к очередному вождению с дополнительными мерами предосторожности - тщательно проверяется состояние колес, выбираются такие маршруты и методы вождения, при которых можно было бы избежать их повреждение.
На подступах к "Dingo Gap". На горизонте - западный вал кратера Гейла
Дюна - около 1 метра высотой - занимает промежуток между двумя уступами, которые открывают путь в юго-западном направлении по относительно гладкой поверхности
(NASA/JPL)
Команда Curiosity использует изображения с камер ровера, чтобы оценить возможность безопасного пересечения дюны. "Решение еще не принято, но было бы разумным пойти проверить", - сказал Джим Эриксон, руководитель проекта MSL Curiosity.
Положение марсохода Curiosity на Sol 528 - 30 января 2014 года. "Dingo Gap" находится на расстоянии 35 метров от ровера. Марсоход заходит в ложбину с юго-востока
(based NASA/JPL-Caltech/Univ.of Arizona)
"Мы посмотрим через дюны на западную сторону долины, чтобы убедиться в том, что местность выглядит также благоприятно, как это следует из анализа орбитальных снимков". Орбитальные изображения были получены камерой HiRISE, установленной на искусственном спутнике Марса - зонде НАСА Mars Reconnaissance Orbiter (MRO).
Песчаная дюна в ложбине Dingo Gap
(NASA/JPL)
Для того, чтобы узнать больше о песчаной дюне в Dingo Gap, ровер подъедет к ней вплотную. Тесты на перемещение по наземным песчаным дюнам показали, что MSL сможет подняться на дюну, но специалисты еще не знают всех особенностей движения ровера вверх по песчаному откосу.
В свое время марсоход Opportunity в течение пяти недель выбирался из песчаной ловушки, а ровер Spirit вовсе застрял. Причина во многом состояла в том, что на песчаных участках по маршруту аппаратов содержалось большее количество мелкозернистой пыли, чем в обычных дюнах на Земле. Поэтому MSL должна предварительно изучить внутреннее строение марсианской дюны.
Колеса Opportunity "пропахали" колею глубиной около 10 см в рыхлом песчаном грунте области Meridiani Planum 26 апреля 2005 года на 446 день пребывания на Красной планете. Песчаная рябь, ставшая ловушкой для марсохода, имела 30 см в высоту и 2,5 м в ширину
(NASA/JPL)
В 2009 году, после пяти лет изучения Марса, марсоход "Спирит" столкнулся с неожиданным препятствием - песчаными ловушками Красной планеты. 1 мая 2009 года ровер застрял в рыхлом грунте, скрытом под коркой более твердой поверхности
(Иллюстрация NASA)
Есть также опасение, что ложбина Dingo Gap достаточно глубока, чтобы нарушить радиосвязь, осуществляемую посредством антенн с высоким коэффициент усиления, непосредственно на линии марсоход - Земля. Поэтому при движении через песчаный холм планируется более тщательно оценивать окружающую местность по снимкам камер ровера.
Местность, окружающая Curiosity на Sol 527 - 29 января 2014 года, в преддверии Dingo Gap
(NASA/JPL)
Другие варианты маршрутов движения "Любопытства" от текущего местоположения к намеченной буровой площадке "KMS-9" были также оценены специалистами JPL.
Участок "KMS-9" находится в 800 метрах езды по прямой линии, но значительно дальше по любому рассмотренному варианту маршрута. Параметры маршрутов были определены научной командой Curiosity на основе орбитальных снимков MRO.
В "KMS-9" мы определили три типа рельефа. Участок имеет свободную и относительно очищенную от пыли поверхность", - сказала Кэти Стек (Katie Stack), сотрудник научной группы из Калифорнийского технологического института в Пасадине.
По словам Стек, эта область привлекательна тем, что здесь находятся участки рельефа отличные ото всех, которые Curiosity посетил до сих пор.
Один участок испещрен бороздками, которые ориентированы в одном направлении. Поверхность другого гладкая, без канавок. Ученые еще не знают, что они из себя представляют.
Исследование KMS-9, возможно, позволит планетологам увидеть новые особенности формирования марсианской поверхности.
Справа на снимке - область KMS-9, которую ровер должен исследовать на пути к горе Шарп. Стрелками показаны уступы между поверхностями различных уровней. Вполне возможно, что обнажения горных пород, примыкающие к этим уступам, являются результатом ветровой эрозии
(NASA/JPL)
Тесты имитировали смещение ровера до 5 сантиметров во время сверления скальной породы, при этом никакого ущерба механизмам причинено не было.
Ударная дрель-перфоратор марсохода Curiosity
(NASA/JPL)
По словам Даниэля Лимонади (Daniel Limonadi), ведущего инженера по отбору проб, тесты подкрепляют уверенность специалистов в успешном выполнении различных манипуляций на склонах горы Шарп роботизированной рукой марсохода.
Близнец Curiosity на песке во время испытаний в пустыне Мохаве
(NASA/JPL)
Некоторые из повреждений могут происходить от усилия задних колес, толкающих средние или передние колеса, которые наткнулись на острые камни, а не от веса ровера, движущегося по острым скальным обломкам.
Продолжая выбирать оптимальные маршруты и приемы вождения, команда Curiosity намерена включить в свой рабочий график дополнительные выходные и вечерние смены в феврале, что позволит планировать большее количество передвижений марсохода.
По материалам NASA/JPL, Astrogeology Science Center USGS
Статьи по теме:
Темная полоса дюн на пути марсохода Curiosity к горе Шарп в кратере Гейла. Многие месяцы ровер будет двигаться по все более сложному рельефу
Комментариев нет:
Отправить комментарий