

Песчаная рябь на дне этой впадины более благоприятна для колес ровера, чем острые камни и ямы на возвышенности Zabriskie Plateau
Hidden Valley (Скрытая Долина) - первая из цепи оврагов, по которым запланирован дальнейший путь марсохода к горе Шарпа. При этом команда Curiosity будет выбирать такой маршрут, на котором покрытию колес ровера будет нанесен наименьший ущерб.
Об этом рассказал Джон Гротцингер (John Grotzinger), научный руководитель миссии Curiosity, в своей лекции, посвященной работе Восьмой Международной конференции по Марсу.
Тем временем команда ровера осторожно ведет его через возвышенность Zabriskie Plateau (Плато Забриски), которой был присвоен высший красный цвет опасности для движения марсохода.
С 18 по 22 июля состоялись три поездки на семьдесят четыре метра по твердой ухабистой поверхности этого плато

Инструменты на руке - манипуляторе обследуют выход горных пород
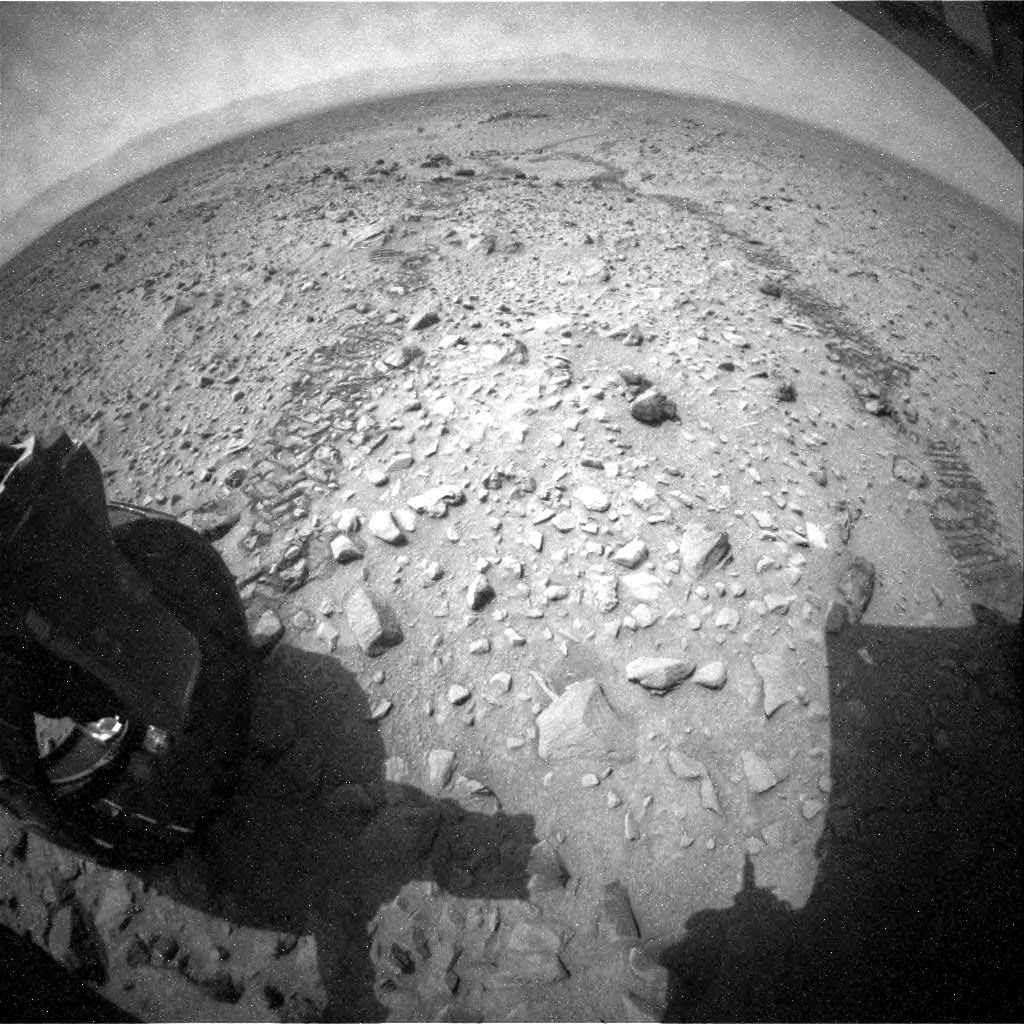
Местность перед марсоходом представляет собой хаос острых каменистых обломков различного калибра и ям с песком. На горизонте видна гора Шарпа, которая с каждым пробегом Любопытства становится немного ближе
Снимок камеры HAZCAM, 21 июля 2014 года, Sol 695
20 июля выполнялась съемка местности и обследование двух объектов (мишеней), представляющих интерес для ученых.

Положение марсохода на Sol 696 - 22 июля 2014 года
Стрелкой обозначена впадина Hidden Valley, песчаная рябь на дне которой более подходит для колес ровера, чем острые камни и ухабы на Zabriskie Plateau
(based NASA/JPL)
21 июля - Sol 695 - Curiosity переместился на 23 метра в направлении юго-юго-запад, обходя ямы и нагромождения камней.
22 июля, после сканирования четырех мишеней с применением рентгеновского спектрометра APXS и камер высокого разрешения Mastcam и MAHLI, марсоход проехал еще 20 метров на юг.

Путь марсохода Curiosity в кратере Гейла
Всего пройдено 8,8 километра с момента "приземления". Высота относительно места посадки составляет 63 метра
NASA/JPL-Caltech/Univ. of Arizona
Погода на Sol 694 - 20 июля 2014 года: солнечно, атмосфера: от -1С до -75С, поверхность: от +2С до -75С, давление - 740Pa (5,55 мм), уровень ультрафиолетового излучения Солнца - повышенный, светлое время суток - с 5:25 до 17:20, данных о ветре и влажности нет.
Снимки камер Curiosity на Sol 696:

Через эту местность Curiosity предстоит спуск в низину Hidden Valley (темная область вверху слева)

Справа на западе

Взгляд на восток
Местность на севере
Колея марсохода на твердом каменистом грунте

Под "ногами"
Главным приоритетом для Curiosity в настоящее время является движение к подножию Эолиды (гора Шарпа). Команда MSL специально запланировала ускоренное движение марсохода, ограничив научные наблюдения.
В основном проводится съемка местности и некоторых объектов на ней, производится мониторинг окружающей среды инструментами RAD, REMS и DAN.
Комментариев нет:
Отправить комментарий